| |||||||
PiMowBot - der smarte π-Rasenmäher-RoboterHerzlich willkommen beim PiMowBot - einem smarten, autonomen Roboter zum Rasenmähen basierend auf dem Raspberry Pi und REBOL. Durch den Einsatz von 3D-Drucktechnologien können das gesamte Gehäuse, das Fahrwerk und wesentliche Teile vom Schneidwerk des PiMowBot Rasenmäher-Roboters selbst hergestellt werden. Nur hier können Sie eine offizielle Lizenz[1] für das Bundle der "PiMowBot-It!" Management Software[2] zum Preis von €19,99 EUR erwerben. Das Softwarebundle beinhaltet bereits alle erforderlichen Module der Management Software, die für einen smarten, mobilen und autonomen Rasenmäher-Roboter auf Basis des Raspberry Pi erforderlich sind. Die Software läuft auf allen Raspberry Pi Modellen. Aufgrund der besonderen Anforderungen an den Stromverbrauch ist das Projekt allerdings mit dem sparsamen und günstigen Raspberry Pi Zero realisiert worden.
Hier einige der wichtigsten technischen Leistungsdaten des PiMowBot Rasenmäher-Roboters.
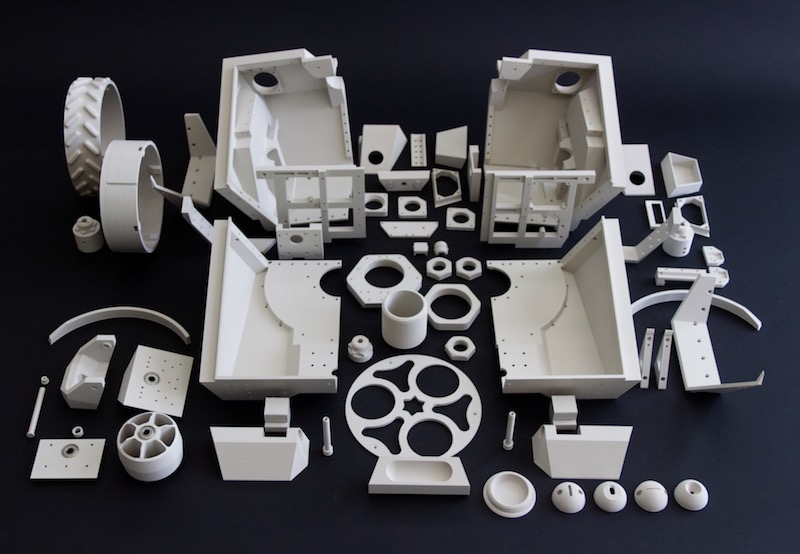
Eine Übersicht sowie Informationen zur aktuellen Version der Software entnehmen Sie bitte den Release-Notes. Hinweis: Die "PiMowBot-It!" Management Software ist aktuell noch "Work in Progress" (WiP). Das Projekt befindet sich zur Zeit noch in der "Entwicklungsphase" und es sind noch nicht alle hier genannten Features vollumfänglich implementiert. Insbesondere die optische Objekt-/Hinderniserkennung benötigt noch weitere Verbesserung. Alle hier abgebildeten Screenshots der Web-Bedienoberfläche stammen vom aktuellen Release und sind keine Mock-Ups. Käufer des aktuellen Releases erhalten alle Upgrades bis zur finalen Version des PiMowBot-It! Softwarebundles kostenfrei. Die finale Version der Software enthält den auf dieser Projektseite beschriebenen Funktionsumfang. Die Hardware, welche auf den folgenden Fotos abgebildet ist, dient ausschließlich zur Veranschaulichung und als Beispiel wie PiMowBot aussieht und wie der Aufbau erfolgt. Die erforderliche Hardware müssen Sie bei den jeweiligen Herstellern bzw. über deren Vertriebskanäle beziehen. TGD-Consulting bietet nur IT-Dienstleistungen und Softwarelösungen an. Sie möchten ihren eigenen PiMowBot basierend auf der "PiMowBot-It!" Management Software bauen? Dann erwerben Sie eine Lizenz und lesen einfach weiter ... Hier finden Sie als Schnelleinstieg direkt eine Antwort auf die häufigsten Fragen:Weitere Antworten auf Fragen finden Sie in der FAQ oder im Deutschen Raspberry Pi Forum. Neben den Informationen auf dieser Projektseite des PiMowBot, ist der Zusammenbau eines PiMowBots auch Schritt für Schritt in diesem Workshop beschrieben. Die Bezeichnung PiMowbot steht für π-Rasenmäher-Roboter und stellt die Erweiterung eines gewöhnlichen Raspberry Pi zu einer smarten Lösung für das mobile und autonome Mähen von Rasenflächen dar. Ein PiMowBot ist vielseitig einsetzbar. Neben dem automatischen, voll autonomen Mähen kann der PiMowBot auch manuell ferngesteuert werden (RC-Betrieb) und dient so als innovatives "Spielzeug" für Frau, Mann und Heranwachsende. Alle wichtigen Funktionen des PiMowBot lassen sich dabei aus der Ferne oder bequem von der Gartenterrasse aus unter Verwendung eines Browsers von jedem beliebigen PC, Tablet oder Smartphone aus steuern und überwachen. Lernen Sie nun die Vorteile und Möglichkeiten des π-Rasenmäher-Roboters in allen Einzelheiten kennen und überzeugen Sie sich gleich hier und jetzt im Internet von der "PiMowBot-It!" Management Software und deren einfach smarten Bedienung sowie den umfangreichen Konfigurationsmöglichkeiten. Hier sieht man Bei der Planung des Projektes wurde von Beginn an darauf geachtet, dass die Kosten für den Materialaufwand aller Komponenten 300,- EUR nicht überschreiten. Die teuersten Komponenten sind das Solar-Modul sowie der Akku zur autonomen Stromversorgung des Rasenmäher-Roboters. Das Gehäuse des PiMoBot Rasenmäher-Roboters ist so designed, dass es im FDM-Verfahren mit den gängigen 3D-Druckern von jedem Maker selbst ausgedruckt werden kann. Als Filament empfiehlt sich PETG oder ABS/HIPS anstelle von PLA zu verwenden, da der Rasenmäher-Roboter später im Outdoor-Betrieb diversen Witterungseinflüssen ausgesetzt ist. Der Systempreis eines PiMowBot inkl. aller benötigten Komponenten liegt, je nach Typ und Anzahl der Komponenten/Sensoren zwischen 250,- und 300,- EUR. Darin sind bereits die Lizenzkosten für die "PiMowBot-It!" Management Software enthalten. Die auf dieser Seite gezeigte Version eines PiMowBot besteht aus folgenden Komponenten: Im Folgenden wird der Zusammenbau und die genaue Funktionsweise des PiMowBot Rasenmäher-Roboters näher beschrieben. Das äußere Erscheinungsbild unseres PiMowBot-Prototyps ist geprägt durch das schrägliegende Solarpanel, die Sensoren an der Front und durch die externe WLAN-Antenne. Im Normalfall wird der Wireless USB-Adapter mit externer WLAN-Antenne im Client-Mode betrieben. Bei Bedarf kann dieser auch als WiFi-Hotspot/Access Point umkonfiguriert werden. Neben der Gewinnung von Photovoltaik-Strom dient das Solarpanel gleichzeitig als Gehäusedeckel des PiMowBots. Das Panel kann einfach angehoben werden, um an die inneren Komponenten zu gelangen. Die verbauten Komponenten sind wartungsarm. Es ist kein Verschleiß der Elektromotoren von Mähwerk und Antrieb oder der Elektronik zu erwarten. Nur der Akku muss nach einigen Jahren ausgetauscht werden, da die Anzahl der Ladezyklen von Akkus begrenzt ist. Aufgrund der Ausmaße des PiMowBot lassen sich alle Komponenten einfach in das 3D-gedruckte Gehäuse einbauen. Deshalb kann jeder ambitionierte Anwender den PiMowBot samt dessen einzelnen Komponenten mit etwas Geschick selbstständig zusammenbauen. Alle Komponenten können direkt im Internet bestellt werden. Die Bezugsquellen sind zum Teil in den obigen Listen verlinkt. Wir verwenden für unseren Prototypen des PiMowBot einen Raspberry Pi Zero, der um den Witty Pi Mini sowie die Sensoren und Aktoren erweitert wird. Dadurch lässt sich auf sehr kostengünstige Weise ein moderner und zuverlässiger Rasenmäher-Roboter im Eigenbau herstellen, der den Vergleich zu Rasenmäher-Roboter im Preissegment über 1000,- EUR nicht scheuen muss. Das spritzwassergeschützte und für den Außenbereich geeignete 3D-gedruckte Gehäuse ist nicht besonders teuer und für jeden Maker mit eigenem 3D-Drucker leicht selbst herzustellen. Je nach gewünschter Farbwahl für das Gehäuse und der gedruckten Teile für Schneid- und Fahrwerk kommt man mit 3-4 Filamentrollen zu je 1kg aus. Um ein mattes Oberflächenfinish der gedruckten Teile ohne zusätzliche Nachbearbeitung zu erhalten, empfiehlt sich die Verwendung von ABS- oder HIPS-Filament beim Druck. Wobei HIPS - im Vergleich zu ABS - sich leichter verarbeiten lässt und weniger zum "Warping" neigt. Falls viel Wert auf einen leisen, geräuschreduzierten Rasenmäher-Roboter gelegt wird, empfiehlt es sich gewisse Teile des PiMowBots mit flexiblen TPU-Filament zu drucken. Insbesondere beim Antrieb und Schneidwerk sollten einige Teile der Baugruppe mit TPU gedruckt werden. Die flexiblen Materialeigenschaften von TPU reduzieren die Ausbreitung von Vibrationen und dämpfen die Geräuschübertragung auf das Gehäuse. TPU ist darüber hinaus äußerst UV- und witterungsbeständig. Allerdings kostet eine Spule TPU-Filament auch wesentlich mehr im Vergleich zu den bereits genannten Filamentsorten. Bei Erwerb einer Lizenz für das Bundle der "PiMowBot-It!" Management Software erhalten Sie auch eine Druckübersicht die detailliert beschreibt, welche Teile pro Baugruppe zu drucken sind. Auf YouTube sind mehrere Video-Tutorials verfügbar, die detailliert und anschaulich illustrieren, wie die gedruckten 3D-Objekte/Komponenten des neuen PiMowBot zusammen passen und montiert werden. Zur Zeit können Sie diese Tutorials sehen:
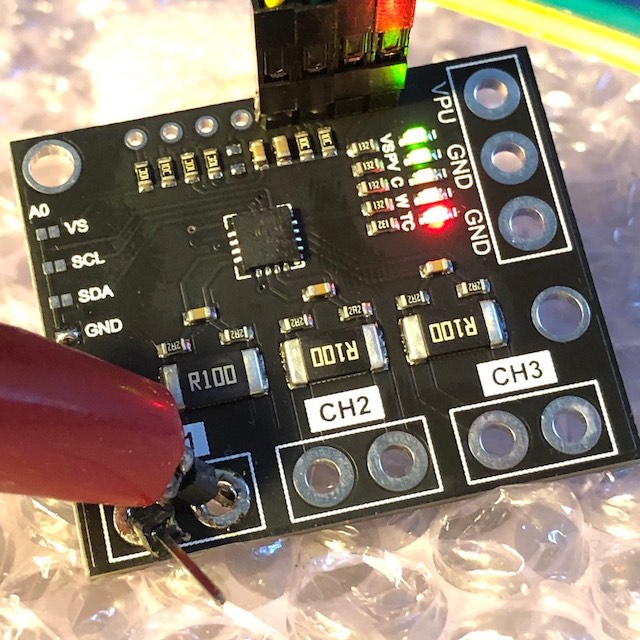
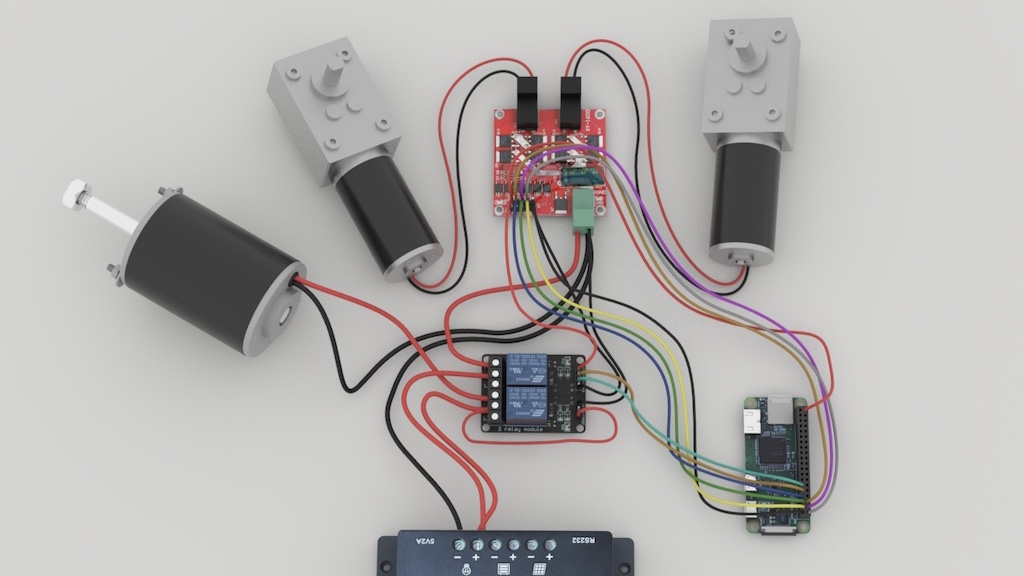
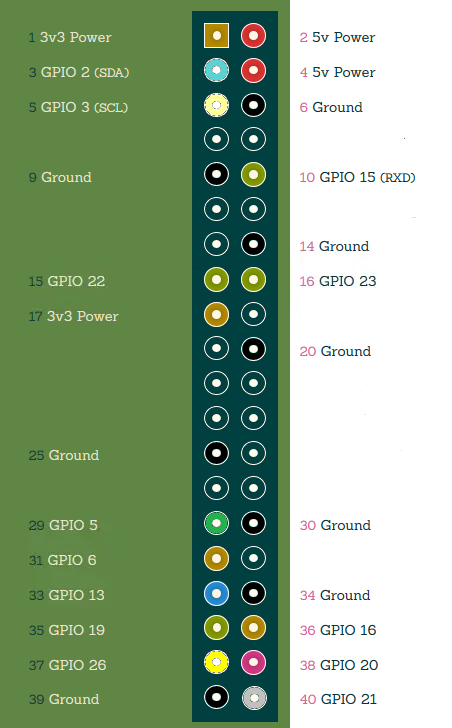
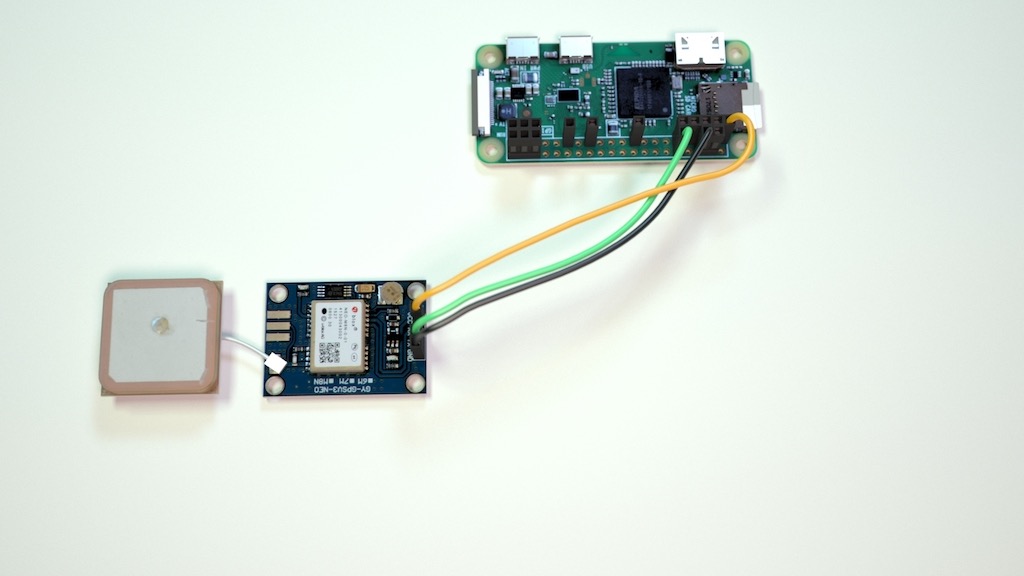
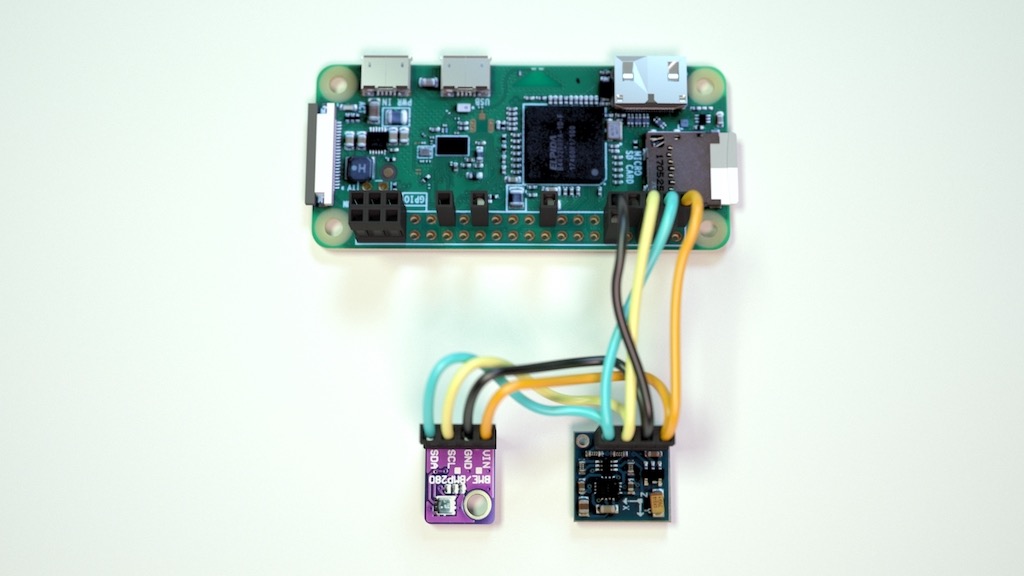
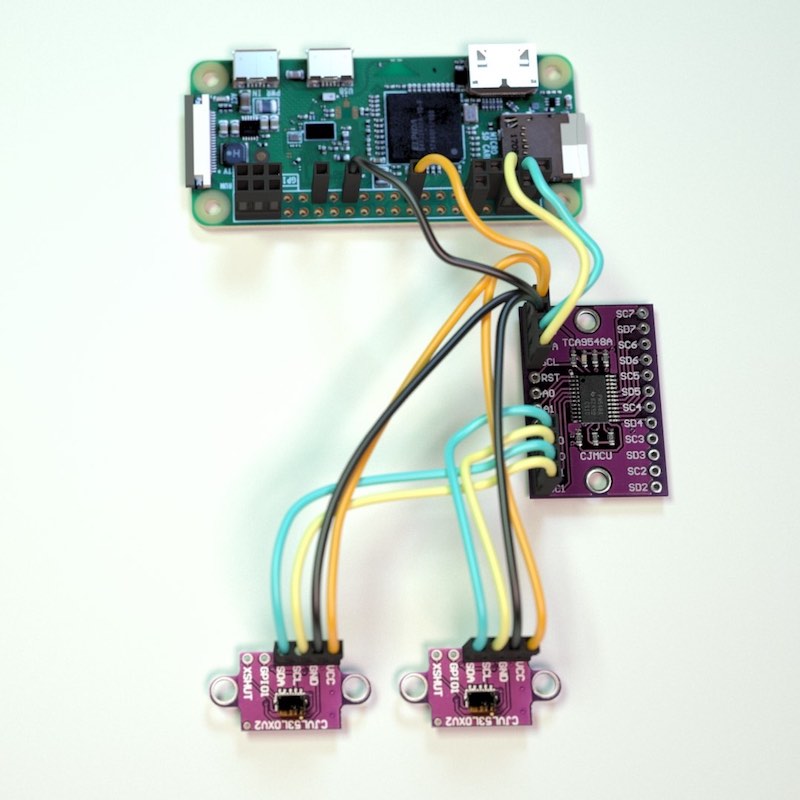
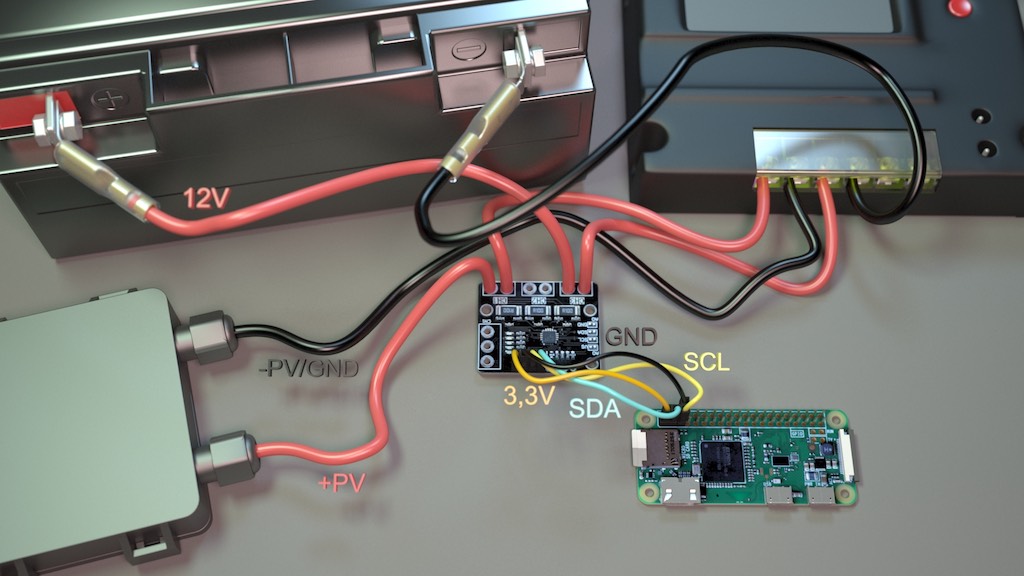
Beim Einbau der elektronischen Komponenten ins Gehäuse sollten zuerst die kleineren Bauteile verbaut werden. Daher sind erst die Sensoren an der dafür vorgesehenen Stelle in der Gehäusefront zu befestigen und die Anschlussleitungen werden nach innen geführt. Nach und nach werden die größeren Bauteile im und am Gehäuse montiert. Für einen autonomen Betrieb des Rasenmäher-Roboters ist eine zuverlässige, ausreichend dimensionierte elektrische Energieversorgung erforderlich. Die Kapazität des zyklenfesten 12V-Akkus sollte mindestens 15Ah betragen. Der Akku wird oberhalb der Antriebsachse leicht versetzt zum Motor des Mähwerkes hin am Gehäuseboden positioniert. So liegt der Schwerpunkt des PiMowBots ideal. Ein Verrutschen des Akkus innerhalb des Gehäuses wird durch einen Stabilisierungsrahmen (Halter des Relais-Moduls) verhindert. Beim Zusammenbau der elektrischen Energieversorgung wird zuerst der Akku mit den passenden Schraubklemm-Anschlüssen des Solarladereglers verbunden. Erst danach wird das Solarpanel an den Laderegler angeschlossen. Achtung: Beim Einbau der elektrischen Komponenten ins Gehäuse und im laufenden Betrieb ist unbedingt zu beachten, dass kein direkter Kurzschluss zwischen den Polen des Akkus entsteht bzw. entstehen kann. So sieht unserer PiMowBot Model D im Vergleich zum ersten PiMowBot-Prototyp von innen aus, wenn das Solarpanel hochgeklappt ist: Alle Sensoren sind in relativer Nähe zum Raspberry Pi im Rasenmäher-Roboter verbaut, um die Leitungswege möglichst kurz zu halten. Die meisten der Sensoren sind über die I²C-Schnittstelle an den Raspberry Pi angeschlossen. Die einzigen Ausnahmen bilden das GPS-Modul, welches die serielle Schnittstelle nutzt und das Kamera-Modul, das den CSI-Port des Raspberry Pi verwendet.
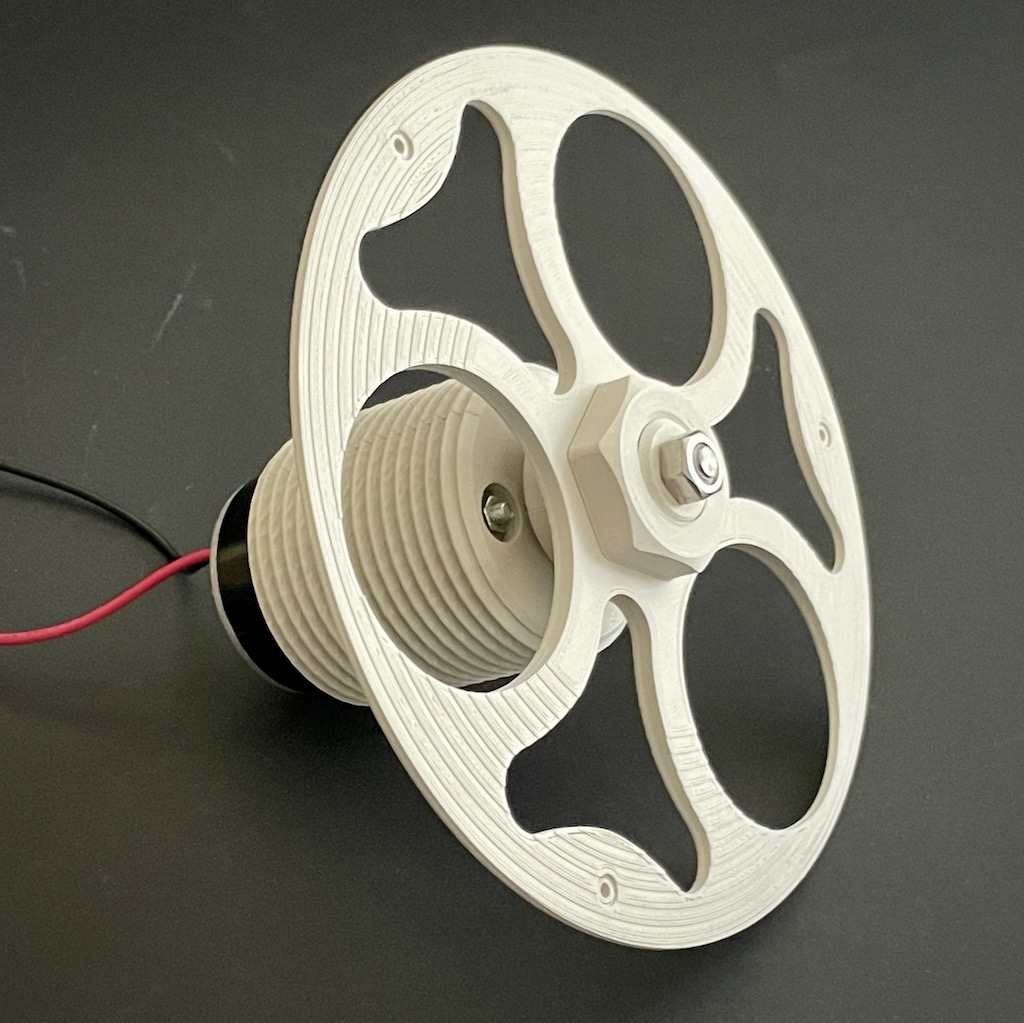
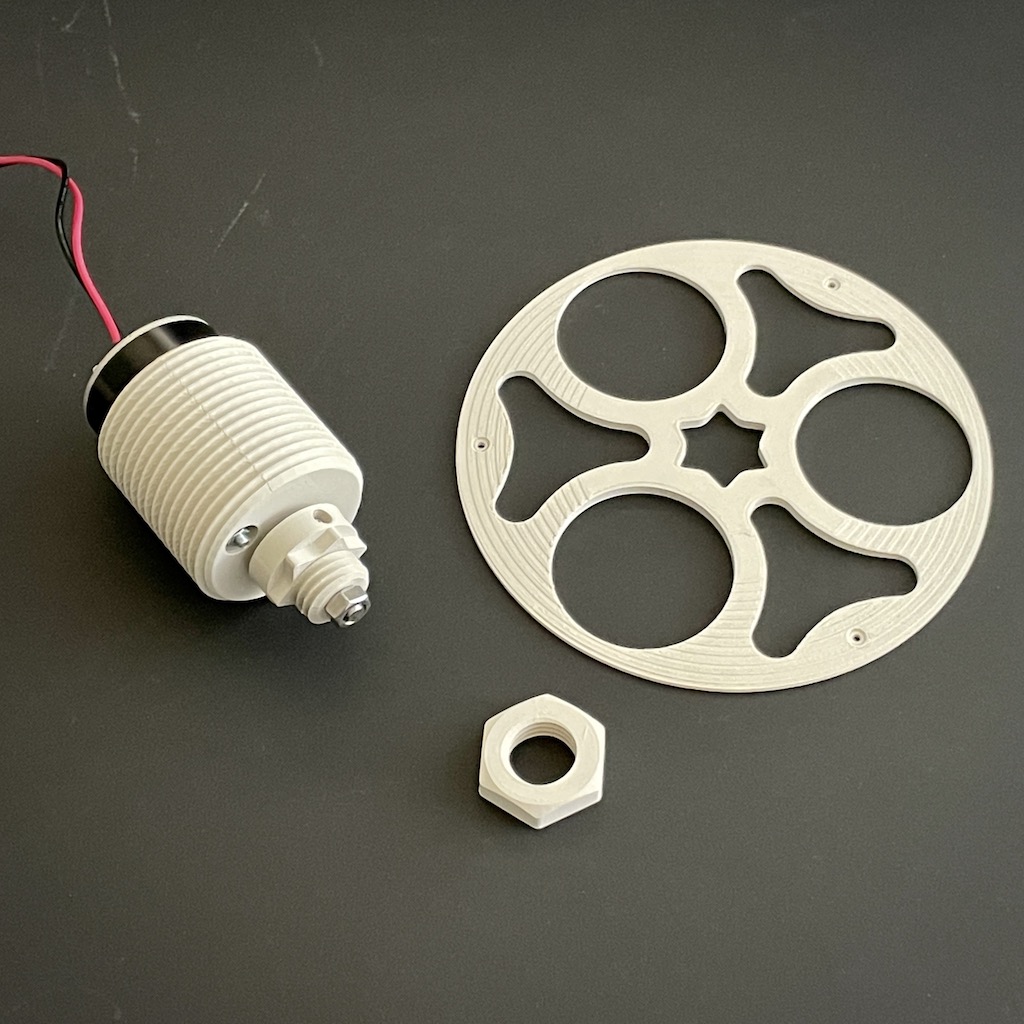
Die Messung der jeweiligen Messgrößen geschieht während des Betriebs automatisch durch die angeschlossenen Sensoren. Die Messwerte aller Sensoren werden periodisch abgefragt und als Telemetriedaten dem Roboter zur Verfügung gestellt. Alle Telemetriedaten werden von der "PiMowBot-It!" Management-Software während des Mähbetriebes des Rasenmäher-Roboters regelmäßig aufgezeichnet und ausgewertet. Unser PiMowBot Prototyp erfasst neben den drei Messgrößen (Temperatur, Feuchtigkeit, Luftdruck) des BME280 Sensors auch dessen Geo-Position und Fahrtrichtung sowie die Spannung des Akkus und der PV-Einspeisung. Die Sensorik signalisiert dem Rasenmäher-Roboter automatisch, ob bei zu feuchtem Rasen oder zu heißen Außentemperaturen der Mähvorgang ausgesetzt werden kann und auf einen späteren Zeitpunkt verschoben wird. Dadurch bleibt die Qualität des Rasens und des Grasschnittes erhalten und wird nicht negativ beeinträchtigt. Normalerweise erkennt die optische Sensorik zuverlässig und selbstständig den Bereich der zu mähenden Rasenfläche. Dies geschieht mit Hilfe einer LASER-gestützten Distanzmessung zu Hindernissen und über die visuelle Objekterkennung der eingebauten Kamera. Das Schneidsystem Das zentrale Kernstück des PiMowBot stellt die "PiMowBot-It!" Management Software dar, welche neben dem Sensor-Modul auch ein Webserver-Modul, das Control-Modul sowie das Archivierungs- & Plot-Modul beinhaltet. Mit Hilfe von letzterem archiviert PiMowBot-It! alle Betriebsdaten und bereitet die Telemetriedaten für die grafische Darstellung als Plot auf. Die Grafiken werden dabei nach Beendigung jedes Mähvorganges automatisch aktualisiert und als Resourcen für die Seiten des Webservers bereitgestellt. Auf übersichtlichen Maps wird der zurückgelegte Weg des Rasenmäher-Roboters auf der Rasenfläche dargestellt. Die Tages- , Wochen-, Monats- sowie Jahresgrafiken (siehe oben) ausgewählter Telemetriedaten werden beim Anklicken vergrößert. Alle Bestandteile der Management Software - bis auf den Interpreter - sind Closed-Source und erfordern den Erwerb einer Lizenz. Die Software benötigt eine REBOL3-Laufzeitumgebung/Interpreter. Wer möchte kann selbst den Source Code des REBOL3-Interpreters für den Raspberry Pi compilieren. Der Master Branch ist unter der Apache2.0-Lizenz auf GitHub veröffentlicht. Alternativ dazu kann ein fertiges Binary für Raspbian direkt hier von unserer Homepage heruntergeladen werden. Der REBOL3-Interpreter ist aber auch Bestandteil des Softwarebundles der "PiMowBot-It!" Management Software. Die Bedienung von PiMowBot-It! erfolgt über den normalen Web-Browser. Das Webserver-Modul übernimmt dabei die komplette Kommunikation und Steuerung. Eine manuelle Steuerung über den Web-Browser unterbricht dabei den autonomen Betrieb des Rasenmäher-Roboters. So ist ein einfacher Not-Aus auch aus der Ferne möglich. Im RC-Betrieb wird bei Tablets oder Smartphones der Rasenmäher-Roboter einfach über die Neigung gesteuert. Bei allen anderen Endgeräten mittels drücken der entsprechenden Knöpfe im WebUI. Mit Hilfe des Webserver-Moduls konfigurieren Sie auch die wesentlichen Funktionen des PiMowBots. Angefangen mit den Einstellungen zum Geofence über die Zeitplanung des Mähens bis zur Aktivierung des autonomen Betriebs werden alle wichtigen Parameter über die Systemeinstellungen zentral vom Browser aus konfiguriert. Eine Übersicht der verschiedenen Einstellungsmöglichkeiten ist aus dem folgenden Bild ersichtlich. Anmerkung: Werksseitig sind die Systemeinstellungen (PiMowBot-Settings) nur über das selbe Netzsegment erreichbar, indem sich auch der PiMowBot befindet. Bei Bedarf kann dies entsprechend der eigenen Sicherheitsanforderungen angepasst werden. Falls keine Adresse für die Admin IP oder keine IP-Range festgelegt wird, ist der π-Rasenmäher-Roboter von jeder beliebigen IP-Adresse aus konfigurierbar! Optional kann auch ein Zugriffsschutz aus einer Kombination von Benutzername und Kennwort individuell festgelegt werden. Über den folgenden Link können Sie eine Lizenz von "PiMowBot-It!" sowie die Software selbst kostenpflichtig beziehen. Bitte beachten Sie die Lizenzbedingungen bevor Sie eine Lizenz der Software käulich erwerben (Hinweis: Sie erhalten nach Zahlungseingang spätestens innerhalb von 3 Werktagen das Softwarebundle per gesonderter E-Mail zugesandt). Mit der Lizenz für das Softwarebundle erwerben Sie auch ein beschränktes, nicht exklusives Nutzungsrecht für die jeweiligen Module. Eine zusätzliche Lizensierung der einzelnen Module ist nicht erforderlich. Trotzdem können bei Bedarf neben einzelnen Lizenzen für die jeweiligen Module ( Archivierungs & Plot / Webserver ) auch Volumenlizenzen unserer Software erworben werden. Genaue Angaben zu den Preisen und Mengenrabatten erhalten Sie auf Anfrage. Bestandskunden können hier ein Upgrade ihrer Lizenz auf die jeweils aktuelle Version der PiMowBot-It! Management Software zum vergünstigten Preis von 9,99 EUR erwerben. Installation & Start: Die Software kommt als Tarball, welcher nur entpackt werden muss (tar xvf PiMowBotIt.tar) und schon steht die "PiMowBot-It!" Management Software einsatzbereit auf dem Raspberry Pi zur Verfügung. Durch manuellen Aufruf des Shell-Skripts ./PiMowBotIt.sh start werden die PiMowBot-It! Module auf dem Raspberry Pi gestartet. Dieses Skript kann natürlich auch als init-Skript zum automatischen Starten von PiMowBot-It! ins System eingebunden werden. Als Alternative zum Shell-Skript lassen sich die PiMowBot-It! Module auch einzeln ausführen. Durch Eingabe von ./bin/r3 PiMowBotIt.r & wird das Archivierungs & Plot-Modul sowie das TempSensor-Modul gestartet. Der Start des Webserver-Moduls erfolgt durch diesen Befehl ./bin/r3 Webserver.r & . Wir empfehlen aber die Einbindung des Webserver-Moduls als ReSpawn-Process in der /etc/inittab oder als systemd-Service. Dies bietet den Vorteil, dass das Webserver-Modul jedesmal neu startet, sobald es beendet wurde. Anwendung: Die weitere Nutzung sowie die Konfiguration der PiMowBot-It! Software erfolgt, wie oben bereits erwähnt, ausschließlich über den Browser des PCs, Tablets oder Smartphones. Geben Sie dazu einfach als URL die IP-Adresse des Raspberry Pi und den verwendeten Port des Webserver-Moduls in dem Browser ein ( z.B.: http://192.168.0.100:8080 ). Alles Weitere ist selbsterklärend oder erschließt sich von selbst. Wir hoffen Sie sind von den Vorteilen des PiMowBot und vom smarten Design der Software sowie der Bauteile im 3D-Druckverfahren ebenso überzeugt wie wir. Falls Sie Fragen, Wünsche oder Verbesserungsvorschläge zum PiMowBot oder zu der "PiMowBot-It!" Management Software haben, wir freuen uns auf Ihre Anfrage. Sie interessieren sich für weitere von uns entwickelte Software und Projekte? Dann besuchen Sie auch mal diese Seiten: | |||||||
- Copyright 2014-2026, TGD-Consulting - FAQ - PiMowBot powered by Serve-It! TNG - |