Teil 1: Eine tolle Sache den Raspberry Pi auch in einen Rasenmäher-Roboter verwandeln zu können.
In diesem Workshop erfahren Sie Schritt für Schritt, wie Sie ihren eigenen Rasenmäher-Roboter zum Mähen ihres Rasens auf Basis des Raspberry Pi Zero selbst erstellen und zusammenbauen können.
Der erste Teil des Workshops beschäftigt sich mit dem Zusammenbau der Hardware, der zweite Teil beschreibt die Installation und Konfiguration der Software.
Der 3D-Druck eines PiMowBots
01 die 3D-Druckvorlagen beschaffen
Alle 3D-Druckvorlagen zum PiMowBot sind über Cults3D.com verfügbar.
02 geeigneten 3D-Drucker und Filament auswählen
Sie besitzen bereits einen eigenen 3D-Drucker mit etwas größerem Druckbett (mind. 30x30cm), dann benötigen Sie noch, je nach individueller Farbgestaltung des PiMowBots, mindestens zwei 1kg Rollen Filament.
Bis auf die vordere und hintere Rumpfhälfte (Body) des PiMowBot können alle 3D-Objekte auch auf einem 3D-Drucker mit gewöhnlicher Druckbettgröße (ca. 20x20cm) ausgedruckt werden.
Der PiMowBot mäht leise. Um den Geräuschpegel noch weiter zu senken, können die Motorkapseln des Antriebes und Teile des Schneidwerks mit TPU-Filament gedruckt werden. Die flexiblen Materialeigenschaften von TPU reduzieren die Ausbreitung von Vibrationen und dämpfen die Geräuschübertragung auf das Gehäuse, welches durch das Solarpanel als Deckel einen Resonanzraum bildet.
03 wichtige Slicer-Einstellungen
Mit Hilfe der Slicer-Software müssen die einzelnen 3D-Druckvorlagen im OBJ Dateiformat in vom 3D-Drucker ausführbaren GCode transformiert werden.
Der Body in der Konstruktion ist sehr stabil und benötigt daher nicht übermäßig große Wandungen oder Infill. Die optimalen Slicer-Einstellungen für den Druck (Schichthöhe 0,2mm, Wandstärke 2mm, Infill Trapez 15%) können je nach Filament und Art des 3D-Druckers etwas variieren.
Tipp: Sollten sich beim 3D-Druck mit Filamenten, die zum Warping neigen - wie ABS/HIPS Filament - ,nach dem Abkühlen des Druckbettes Risse im Ausdruck bilden, ist die "Wall Line Count" und/oder die Temperatur am Druckkopf etwas zu erhöhen.
04 der 3D-Druck der Einzelteile
Vor dem Beginn des eigentlichen 3D-Druckes der Einzelteile des PiMowBots, empfiehlt es sich einen Heattower auszudrucken, um die optimale Druckkopf-Temperatur ihres 3D-Drucker für das Filament zu ermitteln.
Die Teile (3D-Objekte des PiMowBots) sind so gestaltet, dass sie einfach zu drucken sind und für gewöhnlich ohne zusätzliche Stützstruktur auskommen.
05 Ein gutes Druckergebnis erfordert Zeit
Der Ausdruck der Teile benötigt einige Zeit. Die Erfahrung zeigt, dass beim Ausdruck mit etwas geringerer Druckgeschwindigkeit, als vom 3D-Drucker-/Filament-Hersteller empfohlen, bessere Druckergebnisse zu erwarten sind. Die Slicer-Software liefert - in Abhängigkeit zu den gewählten 3D-Druckparametern - bereits entsprechende Angaben zur ungefähr zu erwartenden Druckzeit der jeweiligen Teile.
Weitere Hardware des PiMowBots
01 erforderliche Hardware bestellen
Neben den selbstgedruckten Komponenten benötigt ein PiMowBot noch weitere Hardware. Aus der hier abgebildeten Stückliste sehen Sie, welche Hardwareteile dafür noch beschafft werden müssen.
Da regionale, deutsche oder europäische RaspberryPi-/Makershops nicht alle aufgeführten Bauteile im Sortiment führen, müssen u.a. einige Sensor-Module sowie die Antriebsmotoren online direkt bei Händlern in China bestellt werden. Eine Lieferung aus FernOst benötigt leider einige Zeit, welche aber gut mit dem Ausdruck der 3D-Objekte überbrückt werden kann.
02 sonstige Kleinteile
Bei einigen der gedruckten Komponenten und auch für die Befestigung der Sensor-Module werden 2,9mm Blechschrauben in ausreichender Anzahl (ca. 50-100) benötigt.
Zur Verbesserung der Leichtgängigkeit der hinteren Umlenkrollle sind gängige Kugellager vorgesehen. Diese können zum Beispiel auch aus einem ausgedienten Fidget-Spinner genommen werden. Darüberhinaus werden diverse Kabel/Litzen und DuPont-Steckverbinder fär die Verkabelung der Sensoren und der Aktoren des PiMowBots benötigt. Der sich daraus später beim Zusammenbau ergebende Kabelbaum des PiMowBots ist in der Abbildung2 ersichtlich.
Zusammenbau der Hardware
01 Video-Tutorials anschauen
Auf YouTube sind mehrere Videos veröffentlicht, welche gut den Zusammenbau der ausgedruckten Einzelteile und der übrigen Hardware veranschaulichen. Für die Befestigung beider Bodyhälften und der linken und rechten Antriebseinheit werden, wie bereits erwähnt, mehrere Blechschrauben (2,9x13mm) benötigt. Ebenso erfolgt die Befestigung der Sensoren an der Front des PiMowBots mit dem gleichen Typ Blechschrauben.
02 das Herzstück des PiMowBots montieren
Der Pi Zero und der Witty Pi Mini/Witty Pi 3 Mini werden über den 40 poligen Stacking-Header miteinander verbunden. Beides wird später zusammen über eine Halterung am Body befestigt.
03 Die Sensor-Phalanx an der Front des PiMowBots zusammenbauen
In der Front des PiMowBots werden das GPS-Modul, das PiCamera Modul, das Kompass-Modul, der BME280 sowie beide VL53L0X ToF-Sensoren verbaut. Hier sieht man die Anordnung der Hardwarekomponenten in der vorderen Bodyhälfte:
Der Anschluss des GPS-Moduls erfolgt an die serielle Schnittstelle des Raspberry Pi, wie aus folgender Abbildung ersichtlich:
Die anderen Sensoren werden mit dem I2C-Bus des Rasbperry Pi verbunden. Abbildung 6 zeigt die Verkabelung von Kompass und dem Temperatur/Feuchtesensor, aus Abbildung 7 ist der Anschluss der Sensoren zur Distanzerkennung über den I2C-Multiplexer ersichtlich.
Das PiCamera Modul wird wie gewohnt per entsprechendem Flachbandkabel mit dem PiZero verbunden und ist in das dafür vorgesehene "Kameraauge" einzusetzen. Das Kameraauge mit der PiCAM sollte mittig und soweit nach unten wie möglich ausgerichtet sein.
04 Die Aktoren via Motortreiber mit dem Raspberry Pi verbinden
Die Getriebemotoren beider Antriebseinheiten sind über Motortreiber und das Relais-Modul an den 12V-Ausgang des Solarladereglers angeschlossen (siehe Abb.8). Durch das Relais-Modul ist sichergestellt, dass die Aktoren nur im Betrieb mit Strom versorgt werden. Nach zwei Minuten Idle-Zeit des PiMowBots im RC Betriebsmodus werden die Aktoren so automatisch vom 12V-Stromkreislauf getrennt.
Achtung: Da das Relais-Modul ebenfalls mit 12V betrieben wird, achten Sie darauf, dass die Jumperbrücke zwischen JD-Vcc und Vcc entfernt ist und die 12V nur direkt an JD-VCC anliegen. Ansonsten nimmt der Raspberry Pi Schaden!
Hinweis: Falls der Solarladeregler beim Einschalten des Antriebes einen Überstromfehler auslöst, ist die 12V-Leitung zum Relais-Anschluss für den Antrieb/Motortreiber direkt an +12V des Akkus über eine 10A Sicherung anzuschließen.
05 PV und Akku überwachen
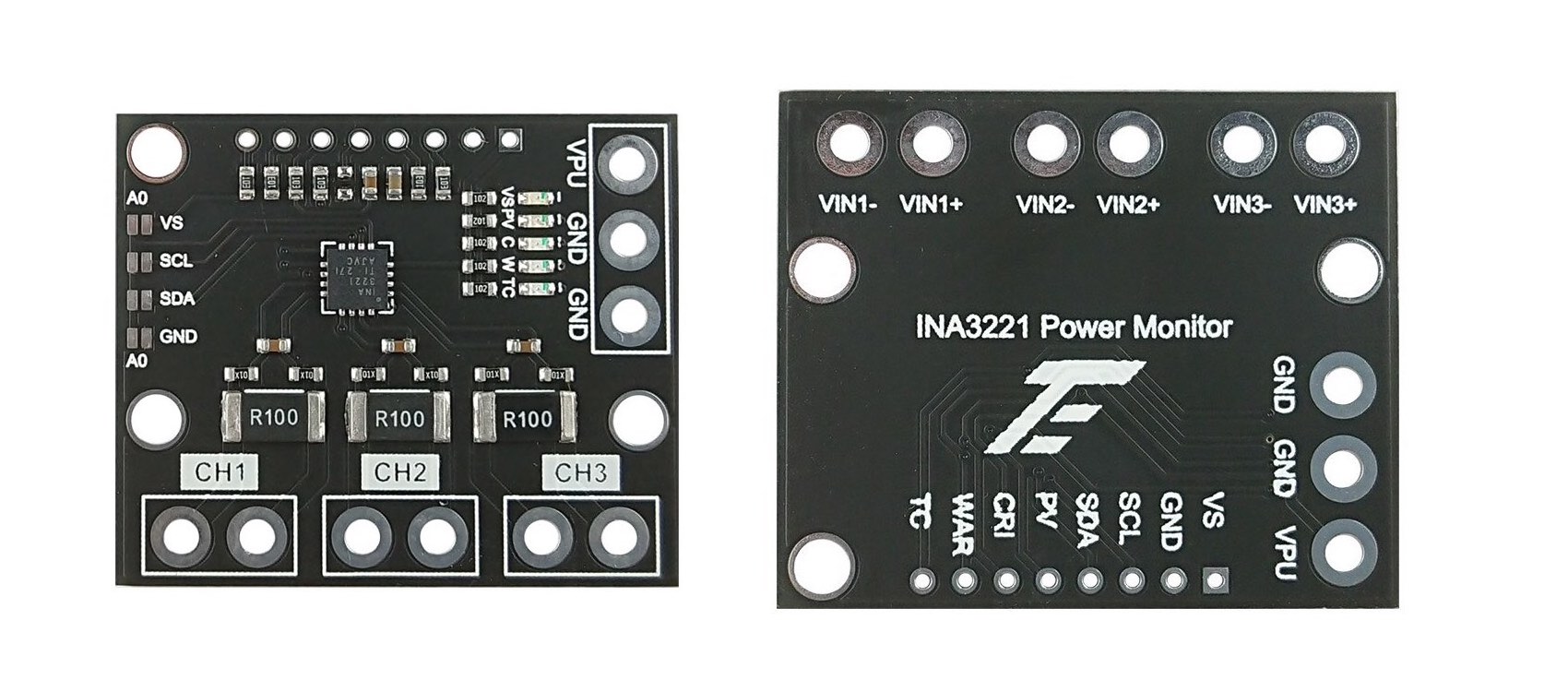
Die Energieversorgung des PiMowBots erfolgt über das Solarpanel und den Akku. Diese Komponenten werden mit Hilfe eines INA3221 I²C-Strom-/Spannungs-Monitors überwacht.
Wie aus Abbildung 8 ersichtlich, erfolgt der Anschluss der INA3221 Messkanäle als High-Side Schaltung im Verbraucherkreis. Das INA3221-Modul selbst ist mit dem I²C-Bus und 3,3V/GND des Raspberry Pi verbunden.
Hinweis: Bitte achten Sie beim INA3221-Modul INA3221 Power Monitor Modul (PCB Ansicht oben/unten) unbedingt darauf, dass es sich als High-Side Schaltung im Verbraucherkreis verwenden lässt und die Leiterbahnen vom Anschluss der jeweiligen Messkanäle (CH1=Akku / CH3=PV) nur zum zugehörigen Shunt führen. Bei Verwendung eines falschen, ungeeigneten Moduls können andere Komponenten des PiMowBots beschädigt werden.
Damit ist der Zusammenbau der Hardware des PiMowBot weitestgehend abgeschlossen und der erste Teil des PiMowBot-Workshops beendet. Erfahren Sie im zweiten Teil des Workshops, wie Sie die Software installieren und konfigurieren um ihren PiMowBot in Betrieb nehmen zu können.
Bitte werfen Sie auch einen Blick in die FAQ. Dort erhalten Sie Antworten auf die häufigsten Fragen zum PiMowBot.